
|
|
|
|
|
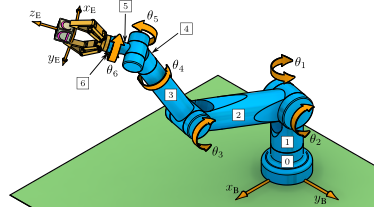
Example 6.3:: Transferring a Wrench (MATLAB)
This example illustrates how to transfer a wrench from one coordinate frame to another.
Contents
Clear All Workspace Objects and Reset All Assumptions
clear all
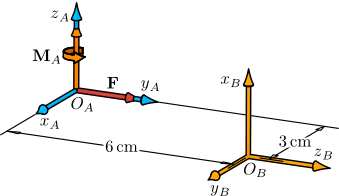
Given Wrench 
WAResA = [0; 5; 0; 0; 0; 10]; % [Force (N), Moment (N-cm)]
The homogeneous transformation from  to
to  .
.
TAToB = [0 0 1 0;
1 0 0 -3;
0 1 0 -6;
0 0 0 1];
% Extract the rotation matrix and the position vector from T_AToB.
Extract the rotation matrix  and the position vector
and the position vector  from
from  .
.
RAToB = TAToB(1:3,1:3) XARelBResB = TAToB(1:3,4)
RAToB =
0 0 1
1 0 0
0 1 0
XARelBResB =
0
-3
-6
Create the cross product operator ![$[\boldmath{X}]$](Example06_03_eq44626.png) .
.
XCross = [ 0 -XARelBResB(3) XARelBResB(2);
XARelBResB(3) 0 -XARelBResB(1);
-XARelBResB(2) XARelBResB(1) 0 ]
% Form the transfer matrix.
XCross =
0 6 -3
-6 0 0
3 0 0
Form the wrench coordinate transfer matrix  .
.
LambdaAToB = [RAToB zeros(3);
XCross*RAToB RAToB ]
LambdaAToB =
0 0 1 0 0 0
1 0 0 0 0 0
0 1 0 0 0 0
6 -3 0 0 0 1
0 0 -6 1 0 0
0 0 3 0 1 0
Wrench transferred from to .
WBResB = LambdaAToB*WAResA
WBResB =
0
0
5
-5
0
0
This MATLAB example illustrates a computation from the textbook Fundamentals of Robot Mechanics by G. L. Long, Quintus-Hyperion Press, 2015. See http://www.RobotMechanicsControl.info for other relevant files.