
|
|
|
|
|
Example 6.2:: A Wrench on a Screw (MATLAB)
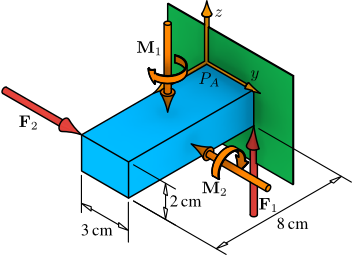
This example illustrates how to find an applied wrench at a given location on a rigid body.
Contents
Clear All Workspace Objects and Reset All Assumptions
clear all
Given Forces and Moments
F1 = [0; 0; 5]; % N F2 = [0; 6; 0]; % N M1 = [0; 0; -7]; % N-cm M2 = [0; -8; 0]; % N-cm
a) The Resultant Force, Resultant Moment, and Wrench at 
X1RelA = [0; 3; -2]; % cm X2RelA = [8; 0; 0]; % cm F = F1 + F2 MA = cross(X1RelA, F1) + cross(X2RelA, F2) + M1 + M2 WA = [F; MA]
F =
0
6
5
MA =
15
-8
41
WA =
0
6
5
15
-8
41
b) The Screw Coordinates and the Pitch
S = F/norm(F) % [unitless] SOA = MA/norm(F) % [cm] ScrewA = [S; SOA] % [unitless; cm] h = dot(S, SOA)/sqrt(dot(S, S))
S =
0
0.7682
0.6402
SOA =
1.9206
-1.0243
5.2495
ScrewA =
0
0.7682
0.6402
1.9206
-1.0243
5.2495
h =
2.5738
c) The Vector Location of  relative to :
relative to :
MPar = dot(MA, S)*S MPerp = MA - MPar d = norm(MPerp)/norm(F) ud = cross(F, MPerp)/norm(cross(F, MPerp)) XBRelA = d*ud h_check = norm(MPar)/norm(F)
MPar =
0
15.4426
12.8689
MPerp =
15.0000
-23.4426
28.1311
d =
5.0666
ud =
0.9254
0.2427
-0.2912
XBRelA =
4.6885
1.2295
-1.4754
h_check =
2.5738
This MATLAB example illustrates a computation from the textbook Fundamentals of Robot Mechanics by G. L. Long, Quintus-Hyperion Press, 2015. See http://www.RobotMechanicsControl.info for other relevant files.