
|
|
|
|
|
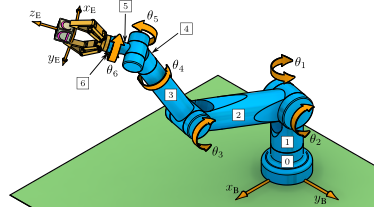
Example 5.08:: Offset Articulate Manipulator: Joint Rate Computation (MATLAB)
This example uses the inverse Jacobian for the offset articulate manipulator to compute the joint rates that correspond to a given Cartesian twist  .
.
Contents

![$[\mathbf{J}_{12}]^{-1}$](Example05_08_eq77774.png)
![$[\mathbf{J}_{21}]^{-1}$](Example05_08_eq05728.png)
Clear All Workspace Objects and Reset All Assumptions
clear all
Joint Values
theta1 = 90; % deg theta2 = 90; % deg theta3 = -180; % deg theta23 = theta2 + theta3; % deg theta4 = 90; % deg theta5 = 90; % deg theta6 = -90; % deg
Structural Parameters
a2 = 43; % cm d3 = 18; % cm d4 = 43; % cm
Given Cartesian Twist
Twist6Rel0Res6 = [0; 0; 0; 0; 0; 25]; % [rad/s; rad/s; rad/s; cm/s; cm/s; cm/s]
Local Variables From U-Matrices
U511 = cosd(theta5)*cosd(theta6); U512 = -cosd(theta5)*sind(theta6); U521 = sind(theta5)*cosd(theta6); U522 = -sind(theta5)*sind(theta6); U411 = U511*cosd(theta4) - sind(theta4)*sind(theta6); U412 = U512*cosd(theta4) - sind(theta4)*cosd(theta6) ; U413 = -cosd(theta4)*sind(theta5); U421 = U511*sind(theta4) + cosd(theta4)*sind(theta6); U422 = U512*sind(theta4) + cosd(theta4)*cosd(theta6); U423 = -sind(theta4)*sind(theta5); U311 = U411*cosd(theta3) - U521*sind(theta3); U312 = U412*cosd(theta3) - U522*sind(theta3); U313 = U413*cosd(theta3) - sind(theta3)*cosd(theta5); U314 = -d4*sind(theta3); U321 = U411*sind(theta3) + U521*cosd(theta3); U322 = U412*sind(theta3) + U522*cosd(theta3); U323 = U413*sind(theta3) + cosd(theta3)*cosd(theta5); U324 = d4*cosd(theta3); U211 = U411*cosd(theta23) - U521*sind(theta23); U212 = U412*cosd(theta23) - U522*sind(theta23); U213 = U413*cosd(theta23) - sind(theta23)*cosd(theta5); U214 = a2* cosd(theta2) - d4*sind(theta23); U221 = U411*sind(theta23) + U521*cosd(theta23); U222 = U412*sind(theta23) + U522*cosd(theta23); U223 = U413*sind(theta23) + cosd(theta23)*cosd(theta5); U224 = a2*sind(theta2) + d4*cosd(theta23);
J11 = [U221, -U421, -U421;
U222, -U422, -U422;
U223, -U423, -U423];
invJ12 = -(1/sind(theta5))*[ -cosd(theta6), sind(theta6), 0;
-U522, U521, 0;
U511, U512, -sind(theta5)];
C1 = [d3*U211 + U214*U421;
d3*U212 + U214*U422;
d3*U213 + U214*U423];
C2 = [U214*U221 - U211*U224;
U214*U222 - U212*U224;
U214*U223 - U213*U224];
C3 = [U314*U321 - U311*U324;
U314*U322 - U312*U324;
U314*U323 - U313*U324];
invJ21 = (1/dot(C1, cross(C2, C3)))*[transpose(cross(C2, C3));
transpose(cross(C3, C1));
transpose(cross(C1, C2))];
Inverse Jacobian: ![$[^{6}\mathbf{J}_{6}]^{-1}$](Example05_08_eq00150.png)
invJ6Res6 = [zeros(3,3), invJ21;
invJ12, -invJ12*J11*invJ21]
invJ6Res6 =
0 0 0 0 0 -0.0233
0 0 0 0 -0.0233 -0.0097
0 0 0 -0.0233 0.0233 0.0097
0 1.0000 0 0 0 0
1.0000 0 0 0 0 -0.0233
0 0 1.0000 0.0233 0 0
Joint Rates  in rad/s
in rad/s
ThetaDot = invJ6Res6*Twist6Rel0Res6 % [rad/s]
ThetaDot =
-0.5814
-0.2434
0.2434
0
-0.5814
0
Joint Rates in deg/s
ThetaDotDeg = (180/pi)*ThetaDot % [deg/s]
ThetaDotDeg =
-33.3115
-13.9443
13.9443
0
-33.3115
0
This MATLAB example illustrates a computation from the textbook Fundamentals of Robot Mechanics by G. L. Long, Quintus-Hyperion Press, 2015. See http://www.RobotMechanicsControl.info for additional relevant files.