
|
|
|
|
|
Example 5.01:: Screw Coordinates (MATLAB)
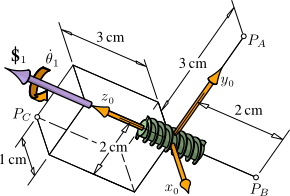
This example illustrates how to determine a screw's coordinates at three different points.
Contents
Clear All Workspace Objects and Reset All Assumptions
%clear all
The Screw's Pitch 
h1 = 2; % cm
For Point 
S1Res0 = [0; 0; 1]; % [unitless] XARel0Res0 = [0; 3; 0]; % [cm] SO1ARes0 = h1*S1Res0 + cross(S1Res0, XARel0Res0); % [cm] Screw1ARes0 = [S1Res0; SO1ARes0]; % [unitless; cm]
For Point 
XBRel0Res0 = [0; 0; -2]; % [cm] SO1BRes0 = h1*S1Res0 + cross(S1Res0, XBRel0Res0); % [cm] Screw1BRes0 = [S1Res0; SO1BRes0]; % [unitless; cm]
For Point 
XCRel0Res0 = [-1; -2; 3]; % [cm] SO1CRes0 = h1*S1Res0 + cross(S1Res0, XCRel0Res0); % [cm] Screw1CRes0 = [S1Res0; SO1CRes0]; % [unitless; cm]
This MATLAB example illustrates a computation from the textbook Fundamentals of Robot Mechanics by G. L. Long, Quintus-Hyperion Press, 2015. See http://www.RobotMechanicsControl.info for additional relevant files.