
|
|
|
|
|
Example 4.02:: 2R Planar: Geometric Solution (MATLAB)
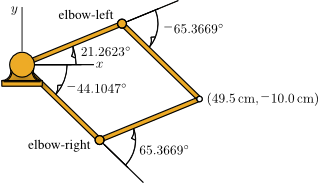
This example computes the inverse kinematics for the 2R planar manipulator via a geometric solution.
Contents
Clear All Workspace Objects and Reset All Assumptions
clear all
Structural Parameters
a1 = 30; % cm a2 = 30; % cm
Position for the Origin 
px = 49.5; % cm py = -10.0; % cm
Computation for 
r = sqrt(px*px + py*py); % cm
Computation for  and
and 
cos_phi1 = (a1*a1 + r*r - a2*a2)/(2*a1*r); cos_phi2 = (a1*a1 + a2*a2 - r*r)/(2*a1*a2); sin_phi1 = sqrt(1 - cos_phi1*cos_phi1); sin_phi2 = sqrt(1 - cos_phi2*cos_phi2); phi1 = atan2d(sin_phi1, cos_phi1); % deg phi2 = atan2d(sin_phi2, cos_phi2); % deg
Computation for 
beta = atan2d(py, px); % deg
The Elbow-Left Solution
theta1L = beta + phi1 % deg theta2L = phi2 - 180 % deg
theta1L = 21.2623 theta2L = -65.3669
The Elbow-Right Solution
theta1R = beta - phi1 % deg theta2R = 180 - phi2 % deg
theta1R = -44.1047 theta2R = 65.3669
This MATLAB example illustrates a computation from the textbook Fundamentals of Robot Mechanics by G. L. Long, Quintus-Hyperion Press, 2015. See http://www.RobotMechanicsControl.info for additional relevant files.