
|
|
|
|
|
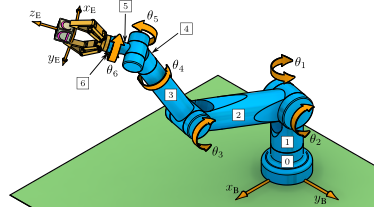
Example 3.8:: MIT Direct Drive Manipulator: Forward Kinematics (MATLAB)
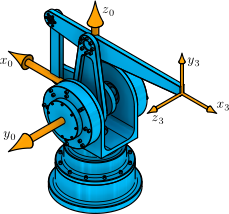
This example computes the forward kinematics for the MIT Direct Drive Manipulator, which has a four-bar sub-chain.
Contents
Clear All Workspace Objects and Reset All Assumptions
clear all
Joint Values
theta1 = 180; % deg (motor angle) theta2 = 90; % deg (motor angle) phi3 = 180; % deg (motor angle) theta3 = phi3 - theta2 - 180; % deg theta23 = theta2 + theta3; % deg
Structural Parameters
l2 = 0.4; % m l3 = 0.4; % m
 : The Transformation from
: The Transformation from  to
to 
T0B = [1 0 0 0.00;
0 1 0 0.00;
0 0 1 0.56;
0 0 0 1];
Local Transformation Variables
U214 = l2*cosd(theta2) + l3*cosd(theta23); U224 = l2*sind(theta2) + l3*sind(theta23);
 : The Transformation from
: The Transformation from  to
to
T30 = [cosd(theta1)*cosd(theta23) -cosd(theta1)*sind(theta23) sind(theta1) U214*cosd(theta1);
sind(theta1)*cosd(theta23) -sind(theta1)*sind(theta23) -cosd(theta1) U214*sind(theta1);
sind(theta23) cos(theta23) 0 U224;
0 0 0 1];
The Forward Kinematics as the Homogeneous Transformation 
T3B = T0B*T30
T3B =
-1.0000 0 0 -0.4000
0 0 1.0000 0
0 1.0000 0 0.9600
0 0 0 1.0000
This MATLAB example illustrates a computation from the textbook Fundamentals of Robot Mechanics by G. L. Long, Quintus-Hyperion Press, 2015. See http://www.RobotMechanicsControl.info for additional relevant files.