
|
|
|
|
|
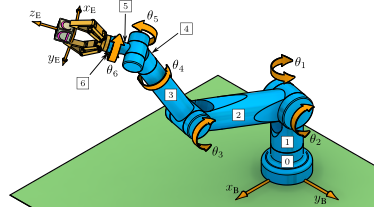
Extra Example:: Puma 560 Manipulator: Jacobian Computation (MATLAB)
This example illustrates a computation with specific joint values for the Puma 560 Jacobian.
Contents
Joint Values
theta1 = 90; % deg theta2 = 90; % deg theta3 = -180; % deg theta23 = theta2 + theta3; % deg theta4 = 90; % deg theta5 = 90; % deg theta6 = -90; % deg
Structural Parameters
a2 = 43.18; % cm a3 = 1.91; % cm d3 = 12.54; % cm d4 = 43.18; % cm
Local Variables From U-Matrices
U511 = cosd(theta5)*cosd(theta6); U512 = -cosd(theta5)*sind(theta6); U521 = sind(theta5)*cosd(theta6); U522 = -sind(theta5)*sind(theta6); U411 = -sind(theta4)*sind(theta6) + U511*cosd(theta4); U412 = -sind(theta4)*cosd(theta6) + U512*cosd(theta4); U413 = -cosd(theta4)*sind(theta5); U421 = cosd(theta4)*sind(theta6) + U511*sind(theta4); U422 = cosd(theta4)*cosd(theta6) + U512*sind(theta4); U423 = -sind(theta4)*sind(theta5); U311 = U411*cosd(theta3) - U521*sind(theta3); U312 = U412*cosd(theta3) - U522*sind(theta3); U313 = -sind(theta3)*cosd(theta5) + U413*cosd(theta3); U314 = -d4*sind(theta3) + a3*cosd(theta3); U321 = U411*sind(theta3) + U521*cosd(theta3); U322 = U412*sind(theta3) + U522*cosd(theta3); U323 = cosd(theta3)*cosd(theta5) + U413*sind(theta3); U324 = a3*sind(theta3) + d4*cosd(theta3); U211 = U411*cosd(theta23) - U521*sind(theta23); U212 = U412*cosd(theta23) - U522*sind(theta23); U213 = -sind(theta23)*cosd(theta5) + U413*cosd(theta23); U214 = a2* cosd(theta2) - d4*sind(theta23) + a3*cosd(theta23); U221 = U411*sind(theta23) + U521*cosd(theta23); U222 = U412*sind(theta23) + U522*cosd(theta23); U223 = cosd(theta23)*cosd(theta5) + U413*sind(theta23); U224 = a2*sind(theta2) + a3*sind(theta23) + d4*cosd(theta23);
Joint-Screw 1: ![$^{6}\hspace{0.34em}\rule[-0.17em]{0.01in}{1.0em}\hspace{-0.34em}{\mathbf S}_{1|6}$](Puma560Jacobian_eq99147.png)
Jacobian(:,1) = [U221; U222; U223; d3*U211 + U214*U421; d3*U212 + U214*U422; d3*U213 + U214*U423];
Joint-Screw 2: ![$^{6}\hspace{0.34em}\rule[-0.17em]{0.01in}{1.0em}\hspace{-0.34em}{\mathbf S}_{2|6}$](Puma560Jacobian_eq14463.png)
Jacobian(:,2) = [-U421; -U422; -U423; U214*U221 - U211*U224; U214*U222 - U212*U224; U214*U223 - U213*U224];
Joint-Screw 3: ![$^{6}\hspace{0.34em}\rule[-0.17em]{0.01in}{1.0em}\hspace{-0.34em}{\mathbf S}_{3|6}$](Puma560Jacobian_eq89276.png)
Jacobian(:,3) = [-U421; -U422; -U423; U314*U321 - U311*U324; U314*U322 - U312*U324; U314*U323 - U313*U324];
Joint-Screw 4: ![$^{6}\hspace{0.34em}\rule[-0.17em]{0.01in}{1.0em}\hspace{-0.34em}{\mathbf S}_{4|6}$](Puma560Jacobian_eq08958.png)
Jacobian(:,4) = [U521; U522; cosd(theta5); 0; 0; 0];
Joint-Screw 5: ![$^{6}\hspace{0.34em}\rule[-0.17em]{0.01in}{1.0em}\hspace{-0.34em}{\mathbf S}_{5|6}$](Puma560Jacobian_eq90146.png)
Jacobian(:,5) = [-sind(theta6); -cosd(theta6); 0; 0; 0; 0];
Joint-Screw 6: ![$^{6}\hspace{0.34em}\rule[-0.17em]{0.01in}{1.0em}\hspace{-0.34em}{\mathbf S}_{6|6}$](Puma560Jacobian_eq54592.png)
Jacobian(:,6) = [0; 0; 1; 0; 0; 0];
The Jacobian Resolved in  :
: 
J6Res6 = Jacobian
J6Res6 =
-1.0000 0 0 0 1.0000 0
0 0 0 1.0000 0 0
0 1.0000 1.0000 0 0 1.0000
0 -43.1800 -43.1800 0 0 0
12.5400 -41.2700 1.9100 0 0 0
-43.1800 0 0 0 0 0
This MATLAB example illustrates a computation from the textbook Fundamentals of Robot Mechanics by G. L. Long, Quintus-Hyperion Press, 2015. See http://www.RobotMechanicsControl.info for additional relevant files.