
|
|
|
|
|
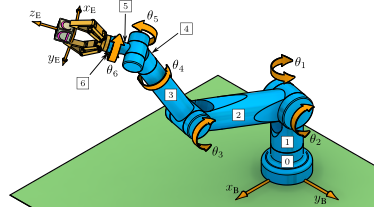
Example 4.06:: Spherical Wrist: Geometric Solution (MATLAB)
This example uses a geometric method to compute the inverse kinematics for a spherical wrist attached to the offset articulate regional structure.
Contents
Clear All Workspace Objects and Reset All Assumptions
clear all
Structural Parameters
a2 = 43; %cm d3 = 18; %cm d4 = 43; %cm
Position and Orientation for OXYZ6
Given information.
T6N = [ 0.5736 -0.8192 0.0000 18
0.5792 0.4056 0.7071 43
-0.5792 -0.4056 0.7071 43
0 0 0 1 ];
Solution for Regional Structure
This solution comes from Example 4.4.
theta1 = 90; % deg theta2 = 0; % deg theta3 = 0; % deg theta23 = theta2 + theta3; % deg
Normal, Orientation, and Approach Vectors
Extract these vectors from T6N.
nx = T6N(1,1); ny = T6N(2,1); nz = T6N(3,1); ox = T6N(1,2); oy = T6N(2,2); oz = T6N(3,2); ax = T6N(1,3); ay = T6N(2,3); az = T6N(3,3);
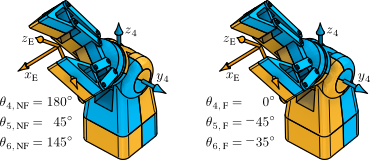
No-Flip Solution
Here, we solve for  ,
,  , and
, and  using the equations for the no-flip configuration.
using the equations for the no-flip configuration.
% Solution for theta4 A = ax*sind(theta1)*sind(theta23) - ay*cosd(theta1)*sind(theta23); B = ax*cosd(theta23) + az*cosd(theta1)*sind(theta23); C = -ay*cosd(theta23) - az*sind(theta1)*sind(theta23); mag_kW_cross_a = sqrt(A*A + B*B + C*C); sintheta4 = (ax*sind(theta1) - ay*cosd(theta1))/mag_kW_cross_a; costheta4 = (-az*sind(theta23) - ay*sind(theta1)*cosd(theta23) ... - ax*cosd(theta1)*cosd(theta23))/mag_kW_cross_a; theta4 = atan2d(sintheta4, costheta4); % deg theta4NF = theta4 % deg % Solution for theta5 sintheta5 = ax*(sind(theta1)*sind(theta4) - cosd(theta1)*cosd(theta23)*cosd(theta4)) ... - ay*(cosd(theta1)*sind(theta4) + sind(theta1)*cosd(theta23)*cosd(theta4)) ... ... - az*sind(theta23)*cosd(theta4); costheta5 = -ax*cosd(theta1)*sind(theta23) - ay*sind(theta1)*sind(theta23) + az*cosd(theta23); theta5 = atan2d(sintheta5, costheta5); % deg theta5NF = theta5 % deg % Solution for theta6 sintheta6 = -nx*(sind(theta1)*cosd(theta4) + cosd(theta1)*cosd(theta23)*sind(theta4)) ... + ny*(cosd(theta1)*cosd(theta4) - sind(theta1)*cosd(theta23)*sind(theta4)) ... -nz*sind(theta23)*sind(theta4); costheta6 = -ox*(sind(theta1)*cosd(theta4) + cosd(theta1)*cosd(theta23)*sind(theta4)) ... + oy*(cosd(theta1)*cosd(theta4) - sind(theta1)*cosd(theta23)*sind(theta4)) ... - oz*sind(theta23)*sind(theta4); theta6 = atan2d(sintheta6, costheta6); % deg theta6NF = theta6 % deg
theta4NF =
180
theta5NF =
45
theta6NF =
145.0005
Flip Solution
Here, we use the relations for the flip configuration.
theta4F = theta4NF - 180 % deg theta5F = -theta5NF % deg theta6F = theta6NF - 180 % deg
theta4F =
0
theta5F =
-45
theta6F =
-34.9995
This MATLAB example illustrates a computation from the textbook Fundamentals of Robot Mechanics by G. L. Long, Quintus-Hyperion Press, 2015. See http://www.RobotMechanicsControl.info for additional relevant files.