
|
|
|
|
|
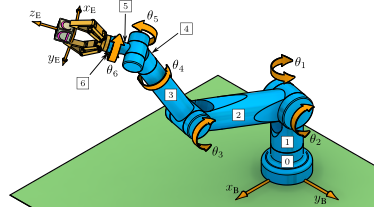
Extra Example:: Puma 560 Manipulator: Forward Kinematics (MATLAB)
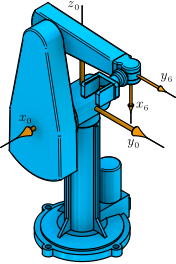
This example computes the forward kinematics for the Puma 560 manipulator. It uses the DH parameters reported by Paul and Zhang in Computationally Efficient Kinematics for Manipulators with Spherical Wrists Based on the Homogeneous Transformation Representation, 1986.
Contents
Clear All Workspace Objects and Reset All Assumptions
clear all
Joint Values
theta1 = 90; % deg theta2 = 90; % deg theta3 = -180; % deg theta23 = theta2 + theta3; % deg theta4 = 90; % deg theta5 = 90; % deg theta6 = -90; % deg
Structural Parameters
a2 = 43.18; % cm a3 = 1.91; % cm d3 = 12.54; % cm d4 = 43.18; % cm
Local Transformation Variables
U512 = -cosd(theta5)*sind(theta6); U522 = -sind(theta5)*sind(theta6); U412 = -sind(theta4)*cosd(theta6) + cosd(theta4)*U512; U413 = -cosd(theta4)*sind(theta5); U422 = cosd(theta4)*cosd(theta6) + sind(theta4)*U512; U423 = -sind(theta4)*sind(theta5); U212 = cosd(theta23)*U412 - sind(theta23)*U522; U213 = -sind(theta23)*cosd(theta5) + cosd(theta23)*U413; U214 = a2*cosd(theta2) - d4*sind(theta23) + a3*cosd(theta23); U222 = sind(theta23)*U412 + cosd(theta23)*U522; U223 = cosd(theta23)*cosd(theta5) + sind(theta23)*U413; U224 = a2*sind(theta2) + a3*sind(theta23) + d4*cosd(theta23);
The 2nd Column of 
U112 = U212*cosd(theta1) - U422*sind(theta1); U122 = U212*sind(theta1) + U422*cosd(theta1); j6Res0 = [U112; U122; U222];
The 3rd Column of
U113 = U213*cosd(theta1) - U423*sind(theta1); U123 = U213*sind(theta1) + U423*cosd(theta1); k6Res0 = [U113; U123; U223];
The 1st Column of
i6Res0 = cross(j6Res0, k6Res0);
The 4th Column of
U114 = U214*cosd(theta1) + d3*sind(theta1); U124 = U214*sind(theta1) - d3*cosd(theta1); X6Rel0Res0 = [U114; U124; U224];
The Forward Kinematics as the Homogeneous Transformation
T60 = [i6Res0 j6Res0 k6Res0 X6Rel0Res0;
0 0 0 1]
T60 =
0 0 1.0000 12.5400
0 1.0000 0 43.1800
-1.0000 0 0 41.2700
0 0 0 1.0000
This MATLAB example illustrates a computation from the textbook Fundamentals of Robot Mechanics by G. L. Long, Quintus-Hyperion Press, 2015. See http://www.RobotMechanicsControl.info for additional relevant files.